
In-Field Detection of American Foulbrood (AFB) by Electric Nose Using Classical Classification Techniques and Sequential Neural Networks



Abstract
:1. Introduction
2. Materials and Methods
2.1. Multi-Sensor Recorder Beesensor V.2
- -
- Main switch,
- -
- LCD display,
- -
- Alphanumeric keypad,
- -
- Four rocker switches controlling GPS, USB, GSM, and sound
- -
- Optical controls (LEDs),
- -
- Loudspeaker,
- -
- USB sockets.
2.2. Experimental Scheme
- Class 0—colonies suffering from American foulbrood (visible clinical symptoms; the disease was confirmed by laboratory diagnostics)—9 objects,
- Class 1—healthy colonies—9 objects.
2.3. Data Processing
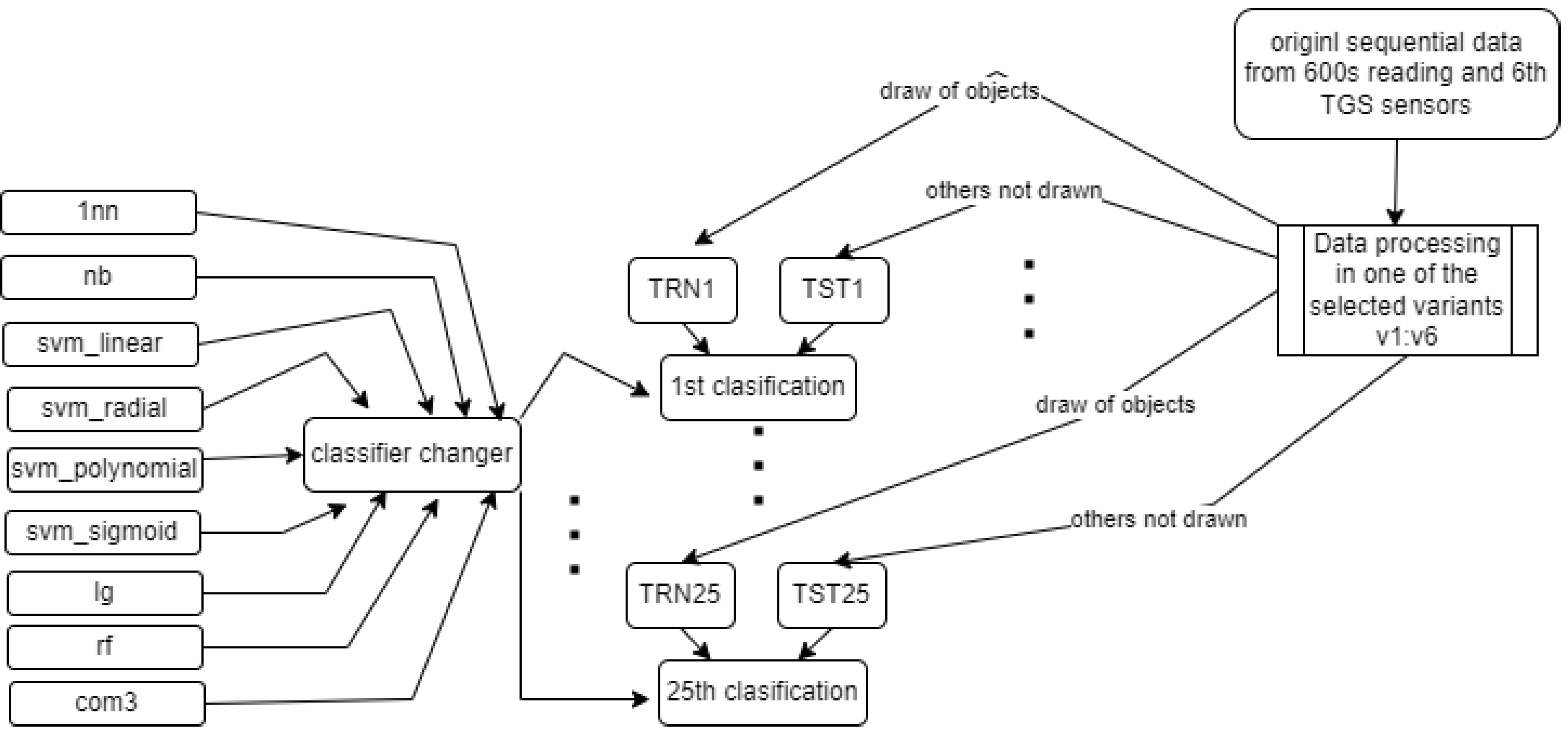
3. The Experimental Part Design
3.1. Classical Classifiers—Using an Extracted Representation of the Data
3.1.1. Variants of Data Preprocessing
- VARIANT1:
- VARIANT2:
- VARIANT3:
- VARIANT4:
- VARIANT5:
- VARIANT6:
3.1.2. Results of the Experiments for Classical Techniques
Analysis of the Results for the 25 Times Train and Test Method
Summary of Results
3.2. v4: Results with BASELINE CORRECTION Max Measure between 301:599 Minus Min Measure between 1:299
3.3. Classification Using a Sequential Neural Network—Using the Full Sequence of Data
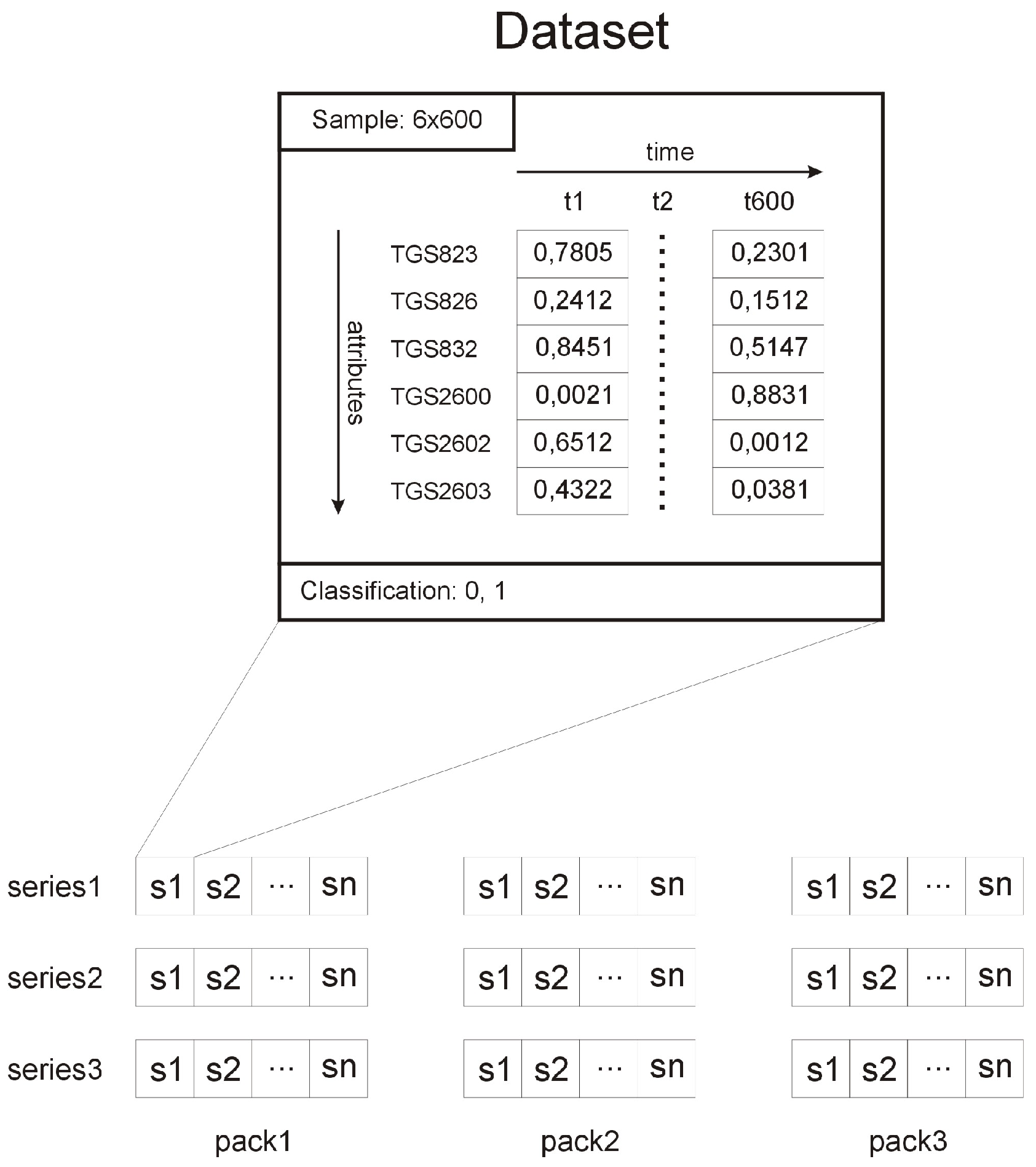
3.3.1. Description of the Input Data
3.3.2. Results for Sequential Network
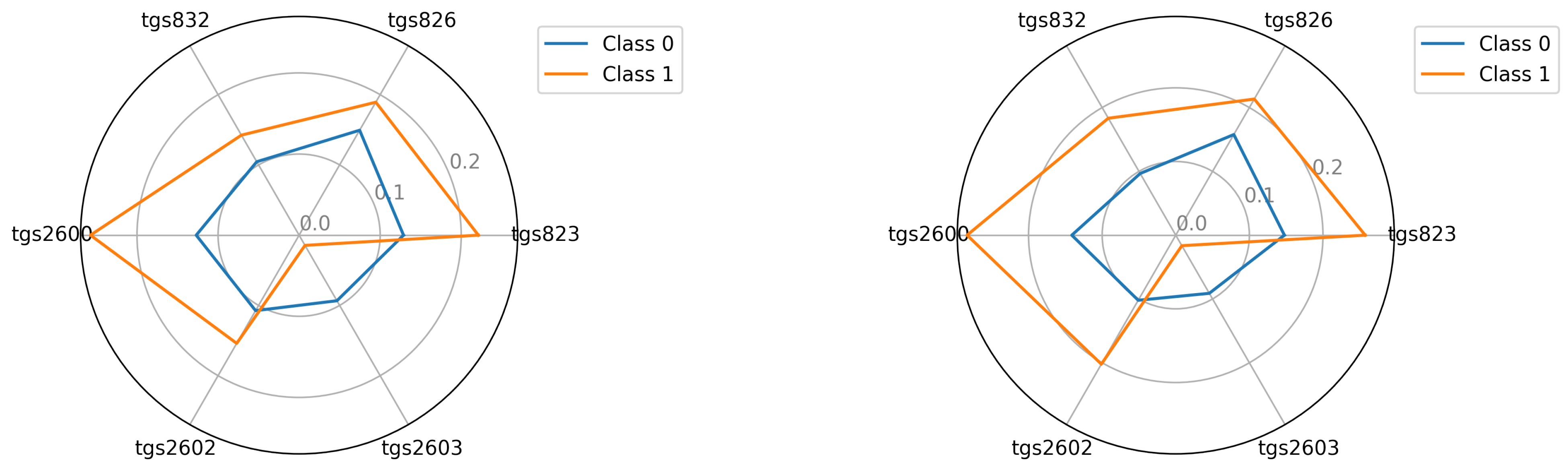
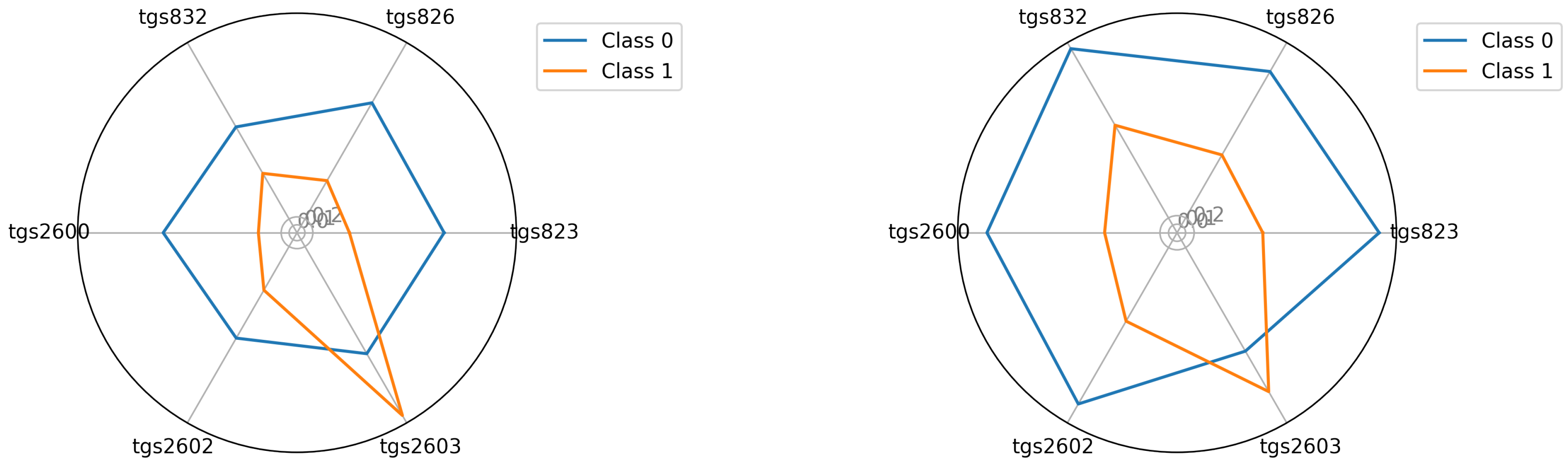
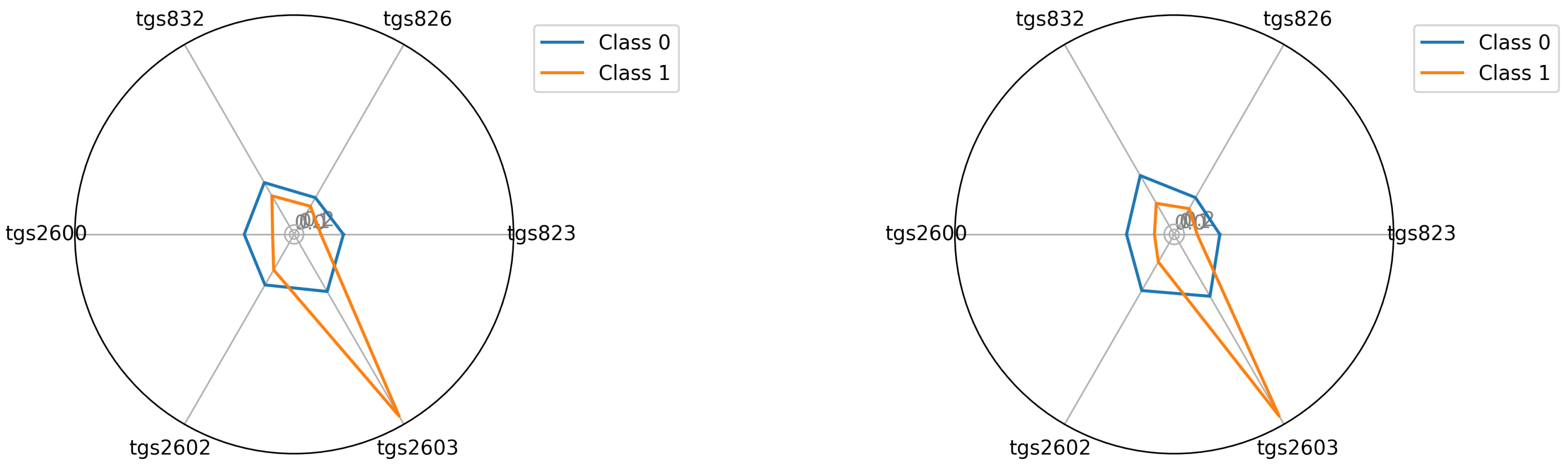
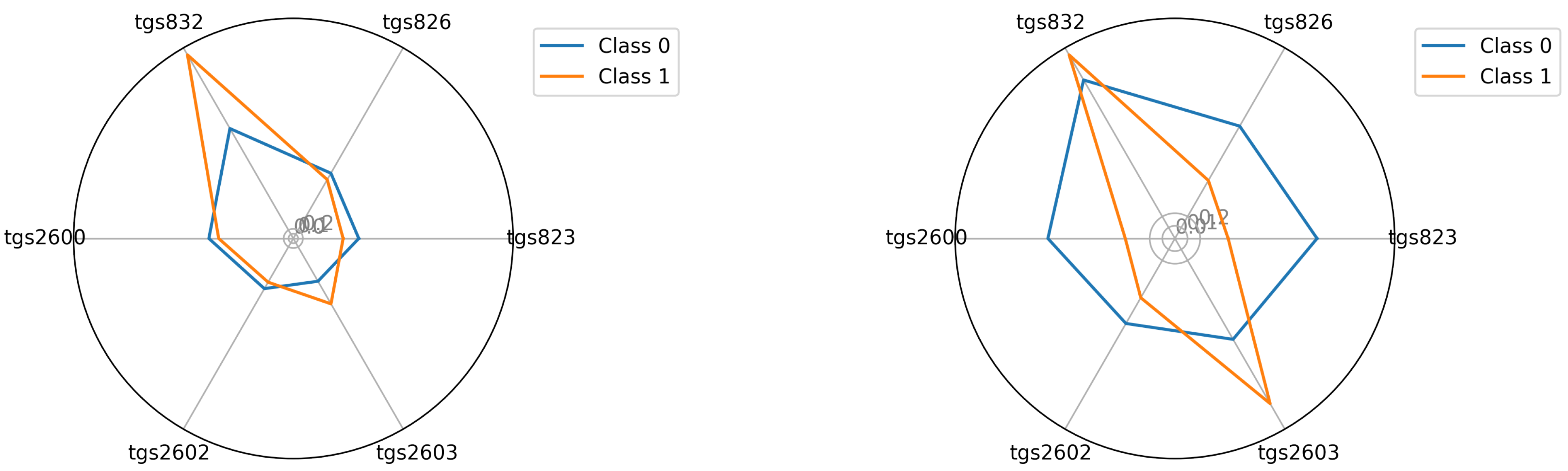
3.4. The Visualisation of the Tested Classes Based on the Average Intensity of TGS Sensor Readings for Data Prepared According to Variant 4
4. Discussion
5. Conclusions
- Beesensor V.2 distinguishes between bee colonies infected with American foulbrood and healthy bee colonies at a level of 73%.
- During the field tests, the third and fourth measurements out of four measurements, which is the result of the measurement procedure implemented in the device, proved to be the most stable regardless of the device used.
- As the third measurement was already stable, the time of measurement of a single bee colony with Beesensor V.2 could be shortened to 30 min.
- A baseline correction was required to obtain optimal classification results. Both winning variants v4 and v2 use it.
- The svm classifier with a linear kernel (svm_linear method) proved to be the best tool for classification (among classical methods) in the context studied. The second most stable method was the classification committee based on the three techniques: 1nn, lg, and svm_linear.
- The results of data analysis using sequential neural networks on the entire data series were found to be comparable with the results for the best classical methods, which are based on a baseline correction and an extracted discrete data sample.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Boligon, A.A.; de Brum, T.F.; Zadra, M.; Piana, M.; dos Santos Alves, C.F.; Fausto, V.P.; dos Santos Barboza Júnior, V.; de Almeida Vaucher, R.; Santos, R.C.V.; Athayde, M.L. Antimicrobial activity of Scutia buxifolia against the honeybee pathogen Paenibacillus larvae. J. Invertebr. Pathol. 2013, 112, 105–107. [Google Scholar] [CrossRef]
- Matheson, A. World Bee Health Report. Bee World 1993, 74, 176–212. [Google Scholar] [CrossRef]
- D’Alessandro, B.; Antúnez, K.; Piccini, C.; Zunino, P. DNA extraction and PCR detection of Paenibacillus larvae spores from naturally contaminated honey and bees using spore-decoating and freeze-thawing techniques. World J. Microbiol. Biotechnol. 2007, 23, 593–597. [Google Scholar] [CrossRef]
- Antúnez, K.; D’Alessandro, B.; Piccini, C.; Corbella, E.; Zunino, P. Paenibacillus larvae larvae spores in honey samples from Uruguay: A nationwide survey. J. Invertebr. Pathol. 2004, 86, 56–58. [Google Scholar] [CrossRef]
- Pohorecka, K.; Skubida, M.; Bober, A.; Zdańska, D. Screening of Paenibacillus larvae spores in apiaries from eastern Poland. Nationwide survey. Part I. Bull. Vet. Inst. Pulawy 2012, 56, 539–545. [Google Scholar] [CrossRef] [Green Version]
- Santos, R.; Alves, C.; Schneider, T.; Lopes, L.; Aurich, C.; Giongo, J.; Brandelli, A.; Vaucher, R. Antimicrobial activity of Amazonian oils against Paenibacillus species. J. Invertebr. Pathol. 2011, 109, 265–268. [Google Scholar] [CrossRef] [PubMed]
- Gochnauer, T.A.; Shearer, D.A. Volatile Acids from Honeybee Larvae Infected with Bacillus Larvae and from a Culture of the Organism. J. Apic. Res. 1981, 20, 104–109. [Google Scholar] [CrossRef]
- Ghaffari, R.; Zhang, F.; Iliescu, D.; Hines, E.; Leeson, M.; Napier, R.; Clarkson, J. Early detection of diseases in tomato crops: An electronic nose and intelligent systems approach. In Proceedings of the International Joint Conference on Neural Networks, Barcelona, Spain, 18–23 July 2010. [Google Scholar] [CrossRef]
- Wilson, A.D.; Forse, L.B. Sensors & Transducers Differences in VOC-Metabolite Profiles of Pseudogymnoascus destructans and Related Fungi by Electronic-nose/GC Analyses of Headspace Volatiles Derived from Axenic Cultures. Sens. Transducers 2018, 220, 9–19. [Google Scholar]
- Ryabtsev, S.; Shaposhnick, A.; Lukin, A.; Domashevskaya, E. Application of semiconductor gas sensors for medical diagnostics. Sens. Actuators B Chem. 1999, 59, 26–29. [Google Scholar] [CrossRef]
- Szczurek, A.; Maciejewska, M.; Bąk, B.; Wilk, J.; Wilde, J.; Siuda, M. Gas Sensor Array and Classifiers as a Means of Varroosis Detection. Sensors 2019, 20, 117. [Google Scholar] [CrossRef] [Green Version]
- Bąk, B.; Wilk, J.; Artiemjew, P.; Wilde, J.; Siuda, M. Diagnosis of Varroosis Based on Bee Brood Samples Testing with Use of Semiconductor Gas Sensors. Sensors 2020, 20, 14. [Google Scholar] [CrossRef] [PubMed]
- Moran, J.; Melonek, J.; Putrino, G.; Leyland, D.; Small, I.; Grassl, J. POSTER: Towards an Electronic Nose for American Foulbrood. In Proceedings of the APIMONDIA 2019, Montreal, QC, Canada, 8–12 September 2019. [Google Scholar]
- Xu, Q.S.; Liang, Y.Z. Monte Carlo cross validation. Chemom. Intell. Lab. Syst. 2001, 56, 1–11. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Brodersen, K.H.; Ong, C.S.; Stephan, K.E.; Buhmann, J.M. The Balanced Accuracy and Its Posterior Distribution. In Proceedings of the 2010 20th International Conference on Pattern Recognition—ICPR’10, Istanbul, Turkey, 23–26 August 2010; pp. 3121–3124. [Google Scholar] [CrossRef]
- Polkowski Lech, A.P. Granular Computing in Decision Approximation; Springer International Publishing: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Mitchell, T.M. Machine Learning; McGraw-Hill: New York, NY, USA, 1997. [Google Scholar]
- Devroye, L.; Györfi, L.; Lugosi, G. A Probabilistic Theory of Pattern Recognition; Springer: New York, NY, USA, 1996. [Google Scholar]
- Duda, R.O.; Hart, P.E. Pattern Classification and Scene Analysis; John Willey & Sons: New York, NY, USA, 1973. [Google Scholar]
- Cortes, C.; Vapnik, V.N. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Nelder, J.A.; Wedderburn, R.W.M. Generalized Linear Models. J. R. Stat. Soc. Ser. A (Gen.) 1972, 135, 370–384. [Google Scholar] [CrossRef]
- Ho, T.K. Random decision forests. In Proceedings of the 3rd International Conference on Document Analysis and Recognition, Montreal, QC, Canada, 14–16 August 1995; Volume 1, pp. 278–282. [Google Scholar] [CrossRef]
- Opitz, D.; Maclin, R. Popular Ensemble Methods: An Empirical Study. J. Artif. Intell. Res. 1999, 11, 169–198. [Google Scholar] [CrossRef]
- Morandat, F.; Hill, B.; Osvald, L.; Vitek, J. Evaluating the Design of the R Language. In ECOOP 2012—Object-Oriented Programming; Noble, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 104–131. [Google Scholar]
- Roine, A.; Saviauk, T.; Kumpulainen, P.; Karjalainen, M.; Tuokko, A.; Aittoniemi, J.; Vuento, R.; Lekkala, J.; Lehtimäki, T.; Tammela, T.L.; et al. Rapid and Accurate Detection of Urinary Pathogens by Mobile IMS-Based Electronic Nose: A Proof-of-Principle Study. PLoS ONE 2014, 12, e114279. [Google Scholar] [CrossRef] [Green Version]
- Horstmann, M.; Steinbach, D.; Fischer, C.; Enkelmann, A.; Grimm, M.O.; Voss, A. PD25-03 an electronic nose system detects bladder cancer in urine specimen: First results of a pilot study. J. Urol. 2015, 193, e560–e561. [Google Scholar] [CrossRef]
- Wang, P.; Tan, Y.; Xie, H.; Shen, F. A novel method for diabetes diagnosis based on electronic nose. Biosens. Bioelectron. 1997, 12, 1031–1036. [Google Scholar] [CrossRef]
- Arasaradnam, R.P.; Ouaret, N.; Thomas, M.G.; Gold, P.; Quraishi, M.N.; Nwokolo, C.U.; Bardhan, K.D.; Covington, J.A. Evaluation of gut bacterial populations using an electronic e-nose and field asymmetric ion mobility spectrometry: Further insights into ‘fermentonomics’. J. Med. Eng. Technol. 2012, 36, 333–337. [Google Scholar] [CrossRef]
- Covington, J.A.; Westenbrink, E.W.; Ouaret, N.; Harbord, R.; Bailey, C.; O’Connell, N.; Cullis, J.; Williams, N.; Nwokolo, C.U.; Bardhan, K.D.; et al. Application of a Novel Tool for Diagnosing Bile Acid Diarrhoea. Sensors 2013, 13, 11899–11912. [Google Scholar] [CrossRef]
- Fend, R.; Geddes, R.; Lesellier, S.; Vordermeier, H.M.; Corner, L.A.; Gormley, E.; Costello, E.; Hewinson, R.G.; Marlin, D.J.; Woodman, A.C.; et al. Use of an Electronic Nose To Diagnose Mycobacterium bovis Infection in Badgers and Cattle. J. Clin. Microbiol. 2005, 43, 1745. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wlodzimirow, K.; Abu-Hanna, A.; Schultz, M.; Maas, M.; Bos, L.; Sterk, P.; Knobel, H.; Soers, R.; Chamuleau, R. Exhaled breath analysis with electronic nose technology for detection of acute liver failure in rats. Biosens. Bioelectron. 2013, 53, 129–134. [Google Scholar] [CrossRef] [PubMed]
- Cramp, A.P.; Sohn, J.H.; James, P.J. Detection of cutaneous myiasis in sheep using an ‘electronic nose’. Vet. Parasitol. 2009, 166, 293–298. [Google Scholar] [CrossRef] [PubMed]
- Bąk, B.; Wilk, J.; Artiemjew, P.; Wilde, J. Recording the Presence of Peanibacillus larvae larvae Colonies on MYPGP Substrates Using a Multi-Sensor Array Based on Solid-State Gas Sensors. Sensors 2021, 21, 4917. [Google Scholar] [CrossRef] [PubMed]
- Wilk, J.T.; Bąk, B.; Artiemjew, P.; Wilde, J.; Siuda, M. Classifying the Biological Status of Honeybee Workers Using Gas Sensors. Sensors 2021, 21, 166. [Google Scholar] [CrossRef]
- Nguyen, D.D.; Ho, T. An efficient method for simplifying support vector machines. In Proceedings of the ICML 2005—Proceedings of the 22nd International Conference on Machine Learning, Bonn, Germany, 7–11 August 2005; pp. 617–624. [Google Scholar] [CrossRef]
- Arshak, K.; Moore, E.; ÓLaighin, G.; Harris, J.; Clifford, S. A Review of Gas Sensors Employed in Electronic Nose Applications. Sens. Rev. 2004, 24, 181–198. [Google Scholar] [CrossRef] [Green Version]
- Schiffman, S.S.; Pearce, T.C. Handbook of Machine Olfaction: Electronic Nose Technology. In Handbook of Machine Olfaction; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2003; pp. 1–635. [Google Scholar] [CrossRef]
- Laref, R.; Ahmadou, D.; Losson, E.; Siadat, M. Orthogonal Signal Correction to Improve Stability Regression Model in Gas Sensor Systems. J. Sens. 2017, 2017, 9851406. [Google Scholar] [CrossRef] [Green Version]
- Ahmadou, D.; Laref, R.; Losson, E.; Siadat, M. Reduction of drift impact in gas sensor response to improve quantitative odor analysis. In Proceedings of the IEEE International Conference on Industrial Technology, Toronto, ON, Canada, 22–25 March 2017; pp. 928–933. [Google Scholar] [CrossRef]
- Göpel, W.; Hesse, J.; Zemel, J.N. Sensors: A Comprehensive Survey; Wiley: Hoboken, NJ, USA, 1991; pp. 341–428. [Google Scholar]
- Haugen, J.E.; Tomic, O.; Kvaal, K. A calibration method for handling the temporal drift of solid state gas-sensors. Anal. Chim. Acta 2000, 407, 23–39. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Substances Detected | Detection Range |
|---|---|---|
| TGS823 | 50∼ | |
| 30∼ | ||
| 100∼ | ||
| 1∼ | ||
| 1∼ | ||
| Session | BEECOM 1 | BEECOM 2 | BEECOM 3 | Data | |||
|---|---|---|---|---|---|---|---|
| No. Bee Colony | Health Status | No. Bee Colony | Health Status | No. Bee Colony | Health Status | ||
| 1 | 44 | sick | 10 | healthy | 1 | sick | 07.09.2020 |
| 2 | 10 | healthy | 44 | sick | 5 | healthy | 07.09.2020 |
| 3 | 1 | sick | 5 | healthy | 44 | sick | 07.09.2020 |
| 4 | 5 | healthy | 1 | sick | 10 | healthy | 07.09.2020 |
| 5 | 2 | sick | 11 | healthy | - | 07.09.2020 | |
| 6 | 11 | healthy | 2 | sick | 3 | sick | 07.09.2020 |
| 7 | 3 | sick | 12 | healthy | 11 | healthy | 07.09.2020 |
| 8 | 12 | healthy | 3 | sick | 2 | sick | 8.09.2020 |
| 9 | 6 | sick | 14 | healthy | 12 | healthy | 8.09.2020 |
| 10 | 14 | healthy | 6 | sick | 20 | sick | 8.09.2020 |
| 11 | 20 | sick | 15 | healthy | 14 | healthy | 8.09.2020 |
| 12 | 15 | healthy | 20 | sick | 6 | sick | 9.09.2020 |
| 13 | 19 | sick | 16 | healthy | 15 | healthy | 9.09.2020 |
| 14 | 16 | healthy | 19 | sick | 13A | sick | 9.09.2020 |
| 15 | 13A | sick | 9 | healthy | 16 | healthy | 9.09.2020 |
| 16 | 9 | healthy | 13A | sick | 19 | sick | 9.09.2020 |
| 17 | 13B | sick | 11B | healthy | 9 | healthy | 9.09.2020 |
| 18 | 11B | healthy | 13B | sick | 13B | sick | 9.09.2020 |
| Pump power | 30% |
| Temperature in the measuring chamber | 39 °C |
| Humidity in the measuring chamber | 25% (21–29%) |
| Temperature in the central part of the bee colony nest | 35 °C |
| Temperature outside the hive | 13 °C (11°–15°) |
| Device | Measurement Session (t = 2400 s) | |||||||
|---|---|---|---|---|---|---|---|---|
| Measurement 0 (t = 600 s) | Measurement 1 (t = 600 s) | Measurement 2 (t = 600 s) | Measurement 3 (t = 600 s) | |||||
| reg. (t = 300 s) | meas. (t = 300 s) | reg. (t = 300 s) | meas. (t = 300 s) | reg. (t = 300 s) | meas. (t = 300 s) | reg. (t = 300 s) | meas. (t = 300 s) | |
| BEECOM 1 | ||||||||
| Device | Measurement | ||
|---|---|---|---|
| BEECOM 1 | 7 | 9 | |
| 7 | 9 | ||
| 7 | 9 | ||
| 9 | 9 | ||
| 9 | 9 | ||
| 9 | 9 | ||
| 9 | 9 | ||
| 9 | 9 | ||
| 9 | 8 |
| Method | |||
|---|---|---|---|
| 1nn | 0.692 | 0.653 | 0.73 |
| nb | 0.575 | 0.6 | 0.55 |
| svm_linear | 0.748 | 0.667 | 0.83 |
| svm_radial | 0.677 | 0.493 | 0.86 |
| svm_polynomial | 0.587 | 0.213 | 0.96 |
| svm_sigmoid | 0.683 | 0.547 | 0.82 |
| lg | 0.565 | 0.6 | 0.53 |
| rf | 0.702 | 0.613 | 0.79 |
| com3 | 0.73 | 0.68 | 0.78 |
| Method | |||
|---|---|---|---|
| 1nn | 0.543 | 0.547 | 0.54 |
| nb | 0.453 | 0.387 | 0.52 |
| svm_linear | 0.688 | 0.547 | 0.83 |
| svm_radial | 0.485 | 0.12 | 0.85 |
| svm_polynomial | 0.512 | 0.173 | 0.85 |
| svm_sigmoid | 0.452 | 0.133 | 0.77 |
| dt | 0.5 | 0 | 1 |
| lg | 0.713 | 0.707 | 0.72 |
| rf | 0.502 | 0.453 | 0.55 |
| com3 | 0.675 | 0.6 | 0.75 |
| Method | |||
|---|---|---|---|
| 1nn | 0.6 | 0.63 | 0.57 |
| nb | 0.625 | 0.68 | 0.57 |
| svm_linear | 0.735 | 0.67 | 0.8 |
| svm_radial | 0.595 | 0.7 | 0.49 |
| svm_polynomial | 0.535 | 0.46 | 0.61 |
| svm_sigmoid | 0.585 | 0.58 | 0.59 |
| lg | 0.6 | 0.61 | 0.59 |
| rf | 0.53 | 0.54 | 0.52 |
| com3 | 0.655 | 0.63 | 0.68 |
| Method | |||
|---|---|---|---|
| 1nn | 0.59 | 0.58 | 0.6 |
| nb | 0.605 | 0.71 | 0.5 |
| svm_linear | 0.685 | 0.6 | 0.77 |
| svm_radial | 0.6 | 0.57 | 0.63 |
| svm_polynomial | 0.61 | 0.34 | 0.88 |
| svm_sigmoid | 0.55 | 0.5 | 0.6 |
| lg | 0.595 | 0.57 | 0.62 |
| rf | 0.53 | 0.54 | 0.52 |
| com3 | 0.66 | 0.59 | 0.73 |
| Method | |||
|---|---|---|---|
| 1nn | 0.645 | 0.74 | 0.55 |
| nb | 0.565 | 0.6 | 0.53 |
| svm_linear | 0.51 | 0.34 | 0.68 |
| svm_radial | 0.54 | 0.41 | 0.67 |
| svm_polynomial | 0.49 | 0.05 | 0.93 |
| svm_sigmoid | 0.47 | 0.3 | 0.64 |
| lg | 0.55 | 0.46 | 0.64 |
| rf | 0.585 | 0.64 | 0.53 |
| com3 | 0.595 | 0.49 | 0.7 |
| Method | |||
|---|---|---|---|
| 1nn | 0.64 | 0.6 | 0.68 |
| nb | 0.653 | 0.76 | 0.547 |
| svm_linear | 0.62 | 0.52 | 0.72 |
| svm_radial | 0.593 | 0.36 | 0.827 |
| svm_polynomial | 0.5 | 0.08 | 0.92 |
| svm_sigmoid | 0.435 | 0.47 | 0.4 |
| lg | 0.71 | 0.66 | 0.76 |
| rf | 0.615 | 0.63 | 0.6 |
| com3 | 0.69 | 0.66 | 0.72 |
| Method | v1 | v6 | sum(:) | sum(:) | ||||
|---|---|---|---|---|---|---|---|---|
| 1nn | 0 | 3 | 2 | 4 | 1 | 2 | 9 | 12 |
| nb | 0 | 2 | 1 | 3 | 0 | 1 | 6 | 7 |
| 19svm_linear | 4 | 5 | 5 | 5 | 6 | 5 | 19 | 30 |
| svm_radial | 0 | 3 | 1 | 2 | 1 | 0 | 6 | 7 |
| svm_polynomial | 0 | 0 | 1 | 1 | 0 | 0 | 2 | 2 |
| svm_sigmoid | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 1 |
| lg | 4 | 3 | 5 | 3 | 0 | 0 | 15 | 15 |
| rf | 1 | 2 | 0 | 2 | 3 | 1 | 5 | 9 |
| com3 | 4 | 6 | 4 | 5 | − | − | 19 | − |
| sum | 13 | 24 | 19 | 26 | 11 | 9 |
| Method | sum(:) | sum(:) | ||||||
|---|---|---|---|---|---|---|---|---|
| 1nn | 0 | 1 | 0 | 1 | 1 | 0 | 2 | 3 |
| nb | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 1 |
| svm_linear | 2 | 5 | 3 | 4 | 4 | 3 | 14 | 21 |
| svm_radial | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| svm_polynomial | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| svm_sigmoid | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 1 |
| lg | 1 | 0 | 2 | 2 | 0 | 0 | 5 | 5 |
| rf | 1 | 1 | 0 | 1 | 1 | 0 | 3 | 4 |
| com3 | 0 | 5 | 3 | 5 | − | − | 13 | − |
| sum | 4 | 12 | 8 | 15 | 6 | 3 |
| Method | sum(:) | sum(:) | ||||||
|---|---|---|---|---|---|---|---|---|
| 1nn | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 1 |
| nb | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| svm_linear | 0 | 3 | 1 | 2 | 2 | 1 | 6 | 9 |
| svm_radial | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| svm_polynomial | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| svm_sigmoid | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| lg | 0 | 0 | 0 | 2 | 0 | 0 | 2 | 2 |
| rf | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 1 |
| com3 | 0 | 1 | 1 | 1 | − | − | 3 | − |
| sum | 0 | 5 | 2 | 6 | 2 | 1 |
| : [1 0] -> [0.7803 0.2197] |
| : [1 0] -> [0.84 0.1597] |
| : [0 1] -> [0.8584 0.1415] |
| : [1 0] -> [0.7495 0.2502] |
| : [0 1] -> [0.8613 0.139 ] |
| : [0 1] -> [0.849 0.1508] |
| : [1 0] -> [0.8296 0.1704] |
| : [1 0] -> [0.8496 0.15 ] |
| : [0 1] -> [0.4597 0.54 ] |
| : [1 0] -> [0.8364 0.1636] |
| : [0 1] -> [0.003414 0.996] |
| Accuracy: 72.72727489471436 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bąk, B.; Szkoła, J.; Wilk, J.; Artiemjew, P.; Wilde, J. In-Field Detection of American Foulbrood (AFB) by Electric Nose Using Classical Classification Techniques and Sequential Neural Networks. Sensors 2022, 22, 1148. https://doi.org/10.3390/s22031148
Bąk B, Szkoła J, Wilk J, Artiemjew P, Wilde J. In-Field Detection of American Foulbrood (AFB) by Electric Nose Using Classical Classification Techniques and Sequential Neural Networks. Sensors. 2022; 22(3):1148. https://doi.org/10.3390/s22031148
Chicago/Turabian StyleBąk, Beata, Jarosław Szkoła, Jakub Wilk, Piotr Artiemjew, and Jerzy Wilde. 2022. "In-Field Detection of American Foulbrood (AFB) by Electric Nose Using Classical Classification Techniques and Sequential Neural Networks" Sensors 22, no. 3: 1148. https://doi.org/10.3390/s22031148